Makina Othandizira a Robot Screw Sight-axis Six-axis Collaborative Robot Screw Tightening Machine

Chipangizo Parameter
| Chitsanzo | GR-XFXZ950 |
| Kufika kwa robot | 950 mm |
| Robot kumapeto kwa katundu | 16Kg ku |
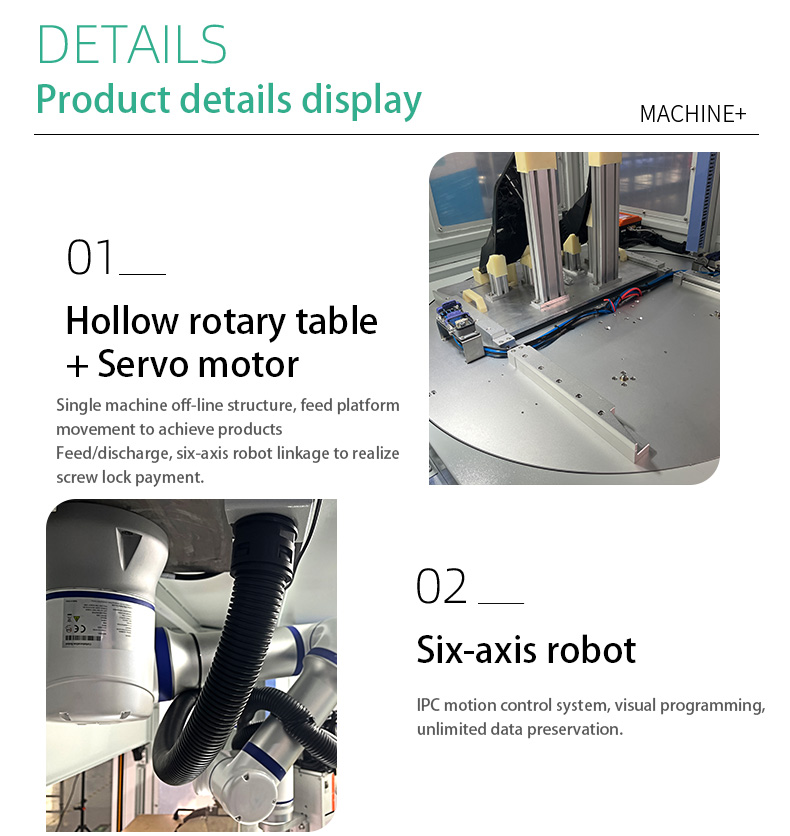
| Kudyetsa nsanja | Central control rotary table + servo motor |
| Njira yodyetsera | Kuwombera / spirate zimagwirizana |
| Lock-up zokolola | 99.95% |
| Ntchito magetsi | AC220V |
| Gwero la mpweya wogwira ntchito | 0.4-0.7MPa |
| p uwu | Pafupifupi 2.5KW |
| Khazikitsani njira yolumikizira | Malo owoneka |
| Demension yakunja (L*W*H) | 1400*1900*1950mm |
| Kulemera (KG) | 800 |
| Mkhalidwe | Zatsopano |
| Chitsimikizo cha zigawo zikuluzikulu | zaka 2 |
Mawonekedwe a chipangizo
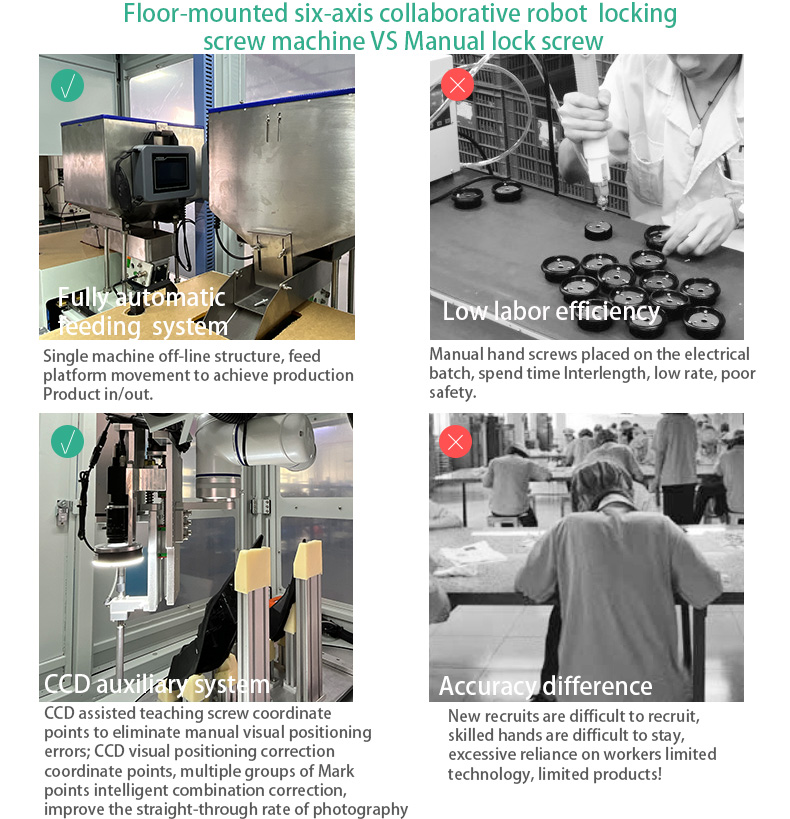
1.Single-machine off-line structure, feed platform movement kuti mukwaniritse zolowetsa/zotulutsa, loboti yolumikizana ndi ma axis six kuti mukwaniritse zolipira zokhoma
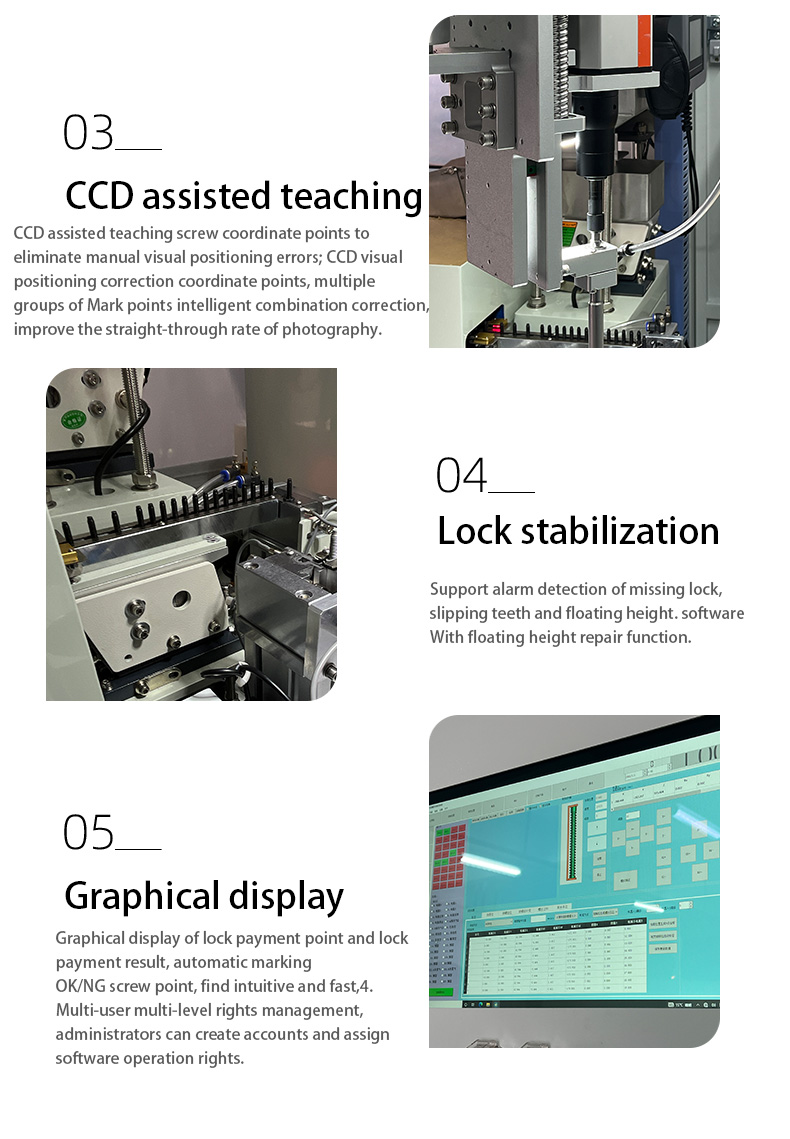
2.IPC kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe ka kayendetsedwe kake;
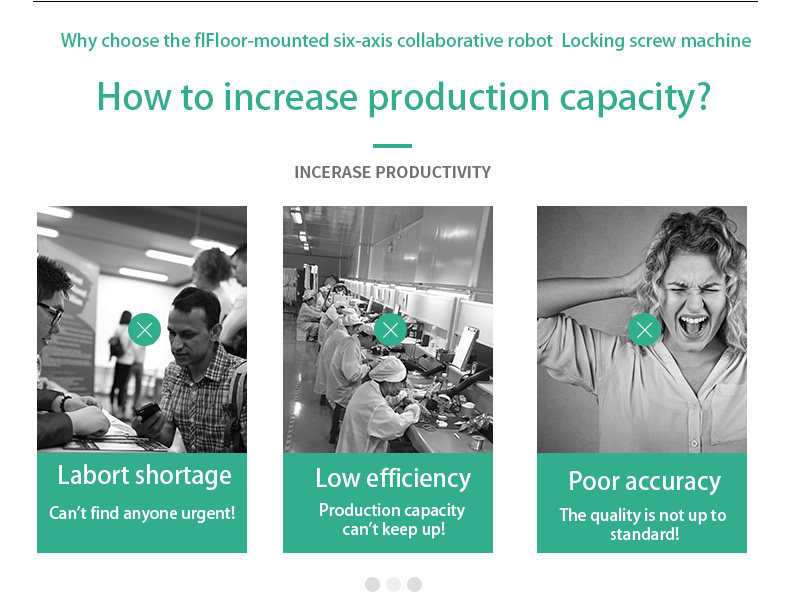
3.Kuwonetsa malo olipira loko ndi loko yolipira, ingolembani OK/NG screw point, pezani mwanzeru komanso mwachangu;
.
5.CCD inathandizira kuphunzitsa wononga mfundo zowongolera kuti zithetse zolakwika zapamanja zowonera; CCD zithunzi kuwongolera kuwongolera mfundo, magulu angapo a Mark mfundo wanzeru kuphatikiza kukonza, kusintha chithunzi chikudutsa mlingo;
6.Support kuzindikira kwa alamu ya loko yosowa, mano otsetsereka ndi kuyandama pamwamba. mapulogalamu akubwera ndi yoyandama kutalika kukonza ntchito;
7.Z-axis ikhoza kukhazikitsidwa ndi laser displacement sensor (kuyesa kutalika koyandama) ndi sensor yozindikira kutsika (posankha);
8.Mtsuko wamagetsi ukhoza kukhala ndi batch yamagetsi ya HIOS, batch yamagetsi ya Qili speed, batch yamagetsi ya servo, batch yamagetsi yanzeru, etc. (posankha);
9.Zida zimatha kukweza MES malinga ndi zomwe makasitomala amafuna, monga makokedwe, kuchuluka kwa matembenuzidwe, Angle, torque curve, malo otsekera.
10.Manual kupanga sikani ndi sikani zodziwikiratu zitha kusankhidwa (ngati mukufuna)
11 .. Deta yopangira ikhoza kutsatiridwa, ndipo pulogalamuyo imabwera ndi bolodi loyendetsa khalidwe. Mitundu yonse ya data imatha kutsitsa ndikutsitsa (ngati mukufuna);
12. Chongani poyambira torque, sungani zotsatira zamacheke ndi funso (posankha).

Tsatanetsatane